
 产品:55
产品:55

OPC历史数据访问规范(OPC HDA)定义了查询、分析历史数据和含有时标的数据的方法。
OPC报警事件访问规范(OPC AE)定义了报警与时间类型的消息类信息,以及状态变化管理等相关标准。
【为什么要开发 OPC UA】
基于com - dcom的技术有不可逆转的缺陷,所以随着技术的进步和各方面数据交换的需要,OPC基金会在2008年发布了新的规范:OPC UA。
【OPC UA 的技术特性】
OPC UA规范不再基于COM/DCOM技术,因此OPC UA不仅可以在Windows平台上实现,也可以在Linux等嵌入式平台上实现。与传统的OPC规范一样,OPC UA也有相同的设计目标:1。功能等价:基于com的OPC规范中的所有功能都映射到OPC UA中。2. 多平台支持:从嵌入式微控制器到基于云的分布式控制架构的支持。3.安全性:信息加密、互访认证、安全监控功能。可扩展性:可以在不影响现有应用程序的情况下添加新特性。5. 丰富信息建模:可以定义的复杂信息,而不是单个数据片段。
ABB机器人长期以来一直支持OPC DA。当使用OPC DA时,机器人需要有pc接口选项。ABB机器人OPC DA的具体使用方法见ABB机器人OPC服务器
随着OPC UA的普及,越来越多的设备开始支持它。关于如何在库卡机器人中使用OPC UA,见库卡机器人OPC UA和Beofu PLC通信
ABB机器人终于在2020年6月4日开始支持OPC UA !!历史性的时刻。
此外,对于robotware6.10及早期版本,机器人只需要PC接口选项,而对于以Robotware6.11开始的版本,机器人需要616-PC接口选项和“1582- OPC UA Server”选项。
1. 下载OPC UA Server

2. 下载后并安装。
3. 电脑连接真实机器人或者打开robotstudio启动虚拟机器人系统
4. 打开OPC UA 配置软件IRC5 OPC UA Server Config Tool(在电脑开始菜单的ABB菜单下)

5. 点击下图,添加机器人化名,稍后点击“Scan”扫描网络上的机器人,并双击创建



6. 点击Save,并出现提示自动重启opc ua server,点击Yes

7. 进入log界面,可以看到opc ua server启动,并记录对应的ip地址和端口,如下图

8. 打开opc ua client测试软件(本文以UAExpert举例)
9. 点击UAExpert软件的下图“+”号
10. 点击添加,如下图

11. 输入从log中获得的server ip地址,如下图

12. 选择连接方式,例如下图

若使用Anonymous登录,则不能写入数据。
默认Username:Default User
Password:robotics
13. 点击状态栏的连接,然后就可以看到神奇的事情—— 连接成功!!!

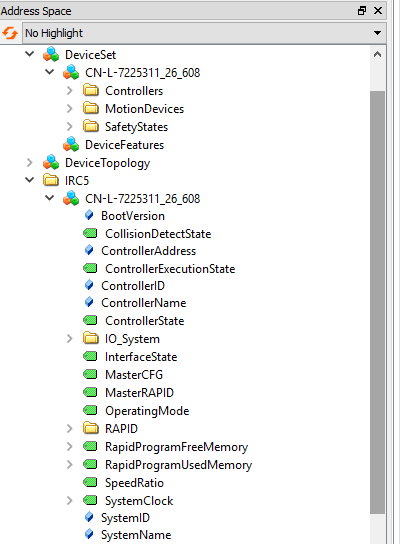
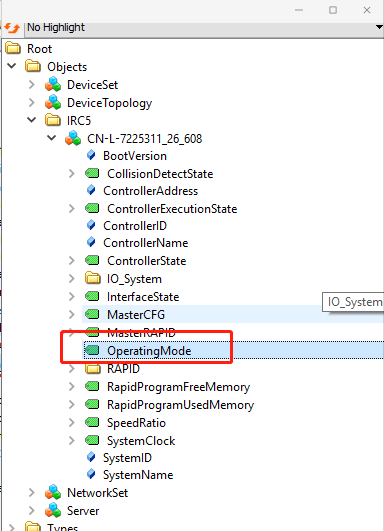
14. 可以从opc ua获取的数据
~All of the RAPID and IOSYSTEM tags
~OperatingMode
~ControllerState
~ControllerExecutionState
~SpeedRatio
~MasterRAPID
~MasterCFG
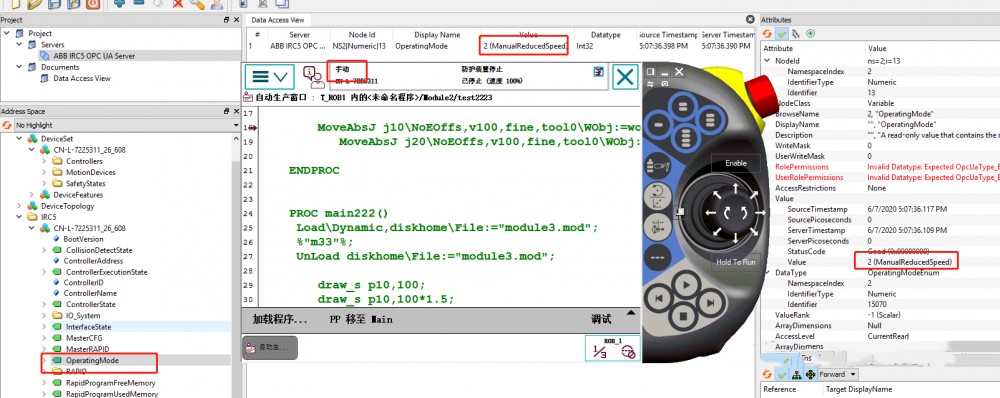
15. 举例获取操作模式(手自动),可以将下图的Operating Mode拖到右侧Data Access View,此时切换机器人状态,Ua客户端数据同步显示
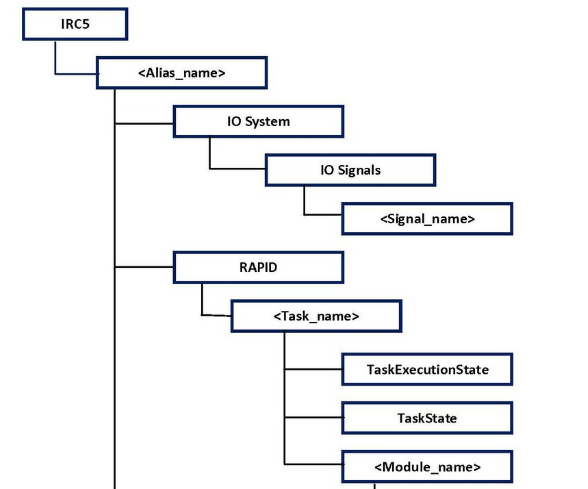
16. 获取模块Module1下的dis数据,则可以将下图的dis拖到右边,下图显示UA client数据与机器人示教器相同。
17. 若要写入数据,直接在UA client写入数据,此时可以看到示教器数据已经被改写

18. 同理可以查看IO以及其他状态。
来源:网络
更多资讯:ABB机器人